第四章 刚体力学
4.1 刚体运动的描述
刚体
刚体是一种特殊的质点系统;无论它在多大外力作用下,系统内任意两质点间的距离始终保持不变。
4.1.1 刚体的平动
平动
当刚体运动时,如果刚体内任何一条给定 的直线,在运动中始终保持它的方向不变,这种 运动叫平动。
对于刚体的平动,其位移相同,速度和加速度也相同。
由以上特点,我们可以将刚体平动简化为质心的(质点)运动。
4.1.2 刚体的定轴转动
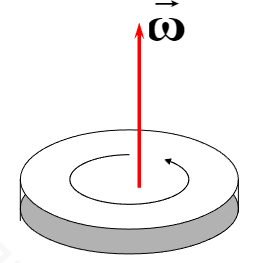
刚体定轴运动
刚体上各点都绕同一转轴作不同半径的 圆周运动,且在相同时间内转过相同的角度
我们描述一个刚体的定轴转动,首先要将模型简化,对于一个定轴旋转的刚体,其垂直于转轴的平面称为转动平面,研究刚体的定轴转动可以简化为研究转动平面的定轴转动。
由右手螺旋定则:
此处,我们模仿运动学,加入多个物理量:
- 角位置\({\theta}\)
- 角速度\({\vec{\omega}}\)
- 角加速度\({\vec{\alpha}}\)
4.2 刚体的角动量与转动惯量
对于一个以Oz为轴做定轴转动的刚体,其对轴Oz的角动量等于其上各个质点的对轴Oz的角动量的矢量和:
此处简化,仅作大小上的探讨
我们令\({\displaystyle J=\sum_i \Delta m_ir_i^2}\),所以我们有:
其中\({J}\)称为转动惯量
同牛顿第二定律作对比,我们发现:
转动和平动在运动学和动力学上都是存在联系的!
4.2.1 一维定轴转动
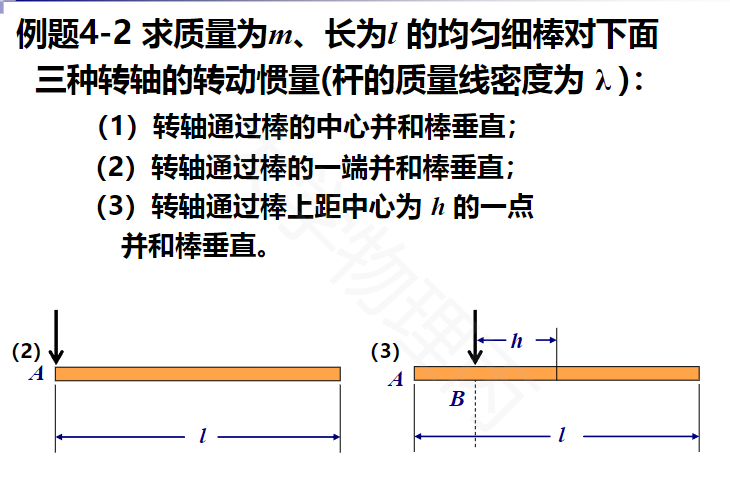
对于一维定轴转动,其必然涉及到沿转动体长度的积分
平行轴定理
对于一刚体,其质心为M,若其绕着任意一个与过质心转轴平行的转轴平行,两者相距d,刚体对其转动惯量为J,则有: \(\({J=J_C + md^2}\)\)其中\({J_C}\)为过该质心转轴的转动惯量
由以上性质,我们知道对于一个刚体来说,其朝向某一方向的一堆转轴里,过质心的那个的转动惯量总是最小的。
剩下两道题留待证明。
4.2.2 二维定轴转动
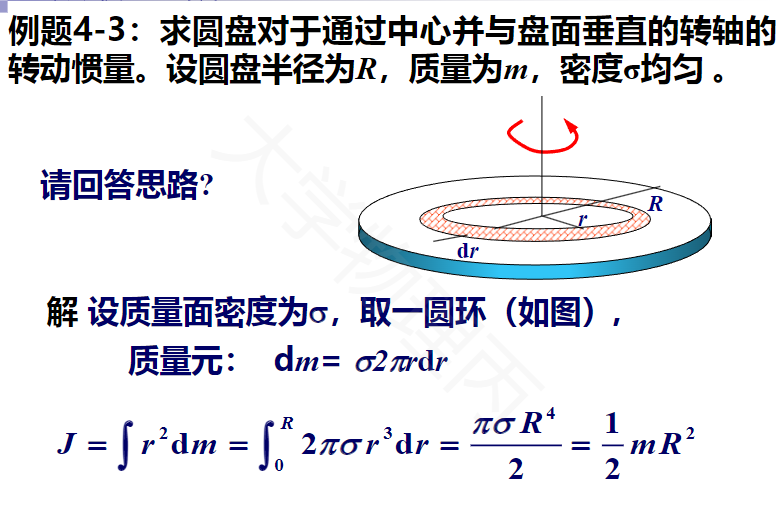
二维定轴转动里,特别为圆,涉及到对“环”的积分。
4.2.3 常用转动惯量
| 刚体 | 轴的位置 | 转动惯量 |
|---|---|---|
| 细圆环 | 通过圆心垂直于平面 | \(MR^2\) |
| 薄圆盘 | 通过圆心垂直于平面 | \(\frac{1}{2}MR^2\) |
| 沿直径 | \(\frac{1}{4}MR^2\) | |
| 细棒 | 通过中点垂直于棒 | \(\frac{1}{12}ML^2\) |
| 通过端点垂直于棒 | \(\frac{1}{3}ML^2\) | |
| 圆柱体 | 通过轴心 | \(\frac{1}{2}MR^2\) |
| 圆筒 | 通过轴心 | \(\frac{1}{2}M(R_1^2+R_2^2)\) |
| 球体 | 通过球心 | \(\frac{2}{5}MR^2\) |
4.3 刚体的定轴转动规律
一般而言,若施加在转动平面上的力不在转动平面时,有:
其中\({\vec{F}_1}\)垂直于转动平面,\({\vec{F}_2}\)在平面内,由右手定则,前者的力矩垂直于转轴,后者的力矩平行于转轴。
值得注意的是,同平动不同的是,转动中的角动量是积累在转轴上。
所以仅有\({\vec{F}_2}\)对转动有作贡献,\({\vec{F}_1}\)在破坏转轴方向。
因此:
- 力臂:对于力矩,我们有\({M_z=rF_2\sin\alpha = F_2d}\),其中\({d=r\sin\alpha}\)称为力臂,是转轴到力作用线的距离
- 方向:确定转轴后,可以沿着转轴确定+、-
4.3.1 刚体定轴转动定律
前文已有说明该重要公式:
上式中\({M}\)为合外力矩,为所有外力矩的矢量和。
同样值得注意的是,上式中\({M}\)的方向仅限于转动切向方向上,因为仅有此方向上对角动量有直接贡献作用。(其他方向的力需要对这个方向做正交分解)
后面各种物理量自然容易推导,故此省略
4.3.2 刚体定轴转动的角动量定理
刚体的角动量定理
对刚体定轴转动,外力矩等于角动量对时间的变化率 \(\({M=\frac{{\rm d}L}{{\rm d}t}}\)\) 其中\({L=J\omega}\)为刚体的角动量
值得注意的是,对于刚体的角动量分析,可以将其转化为对多个分力产生的力矩的分析,最后取矢量和,形如下:
不难看出其积分形式:
角动量守恒定理
当外力矩为零时,角动量保持恒定 \(\({L=J\omega=常量}\)\) 当合外力矩为零时,系统的初末态满足: \(\({\sum_i J_i\omega_i=\sum_i J_{0i}\omega_{0i}}\)\)
4.4 小结
以下给出平动与转动之间的对比:
| 质点直线运动 | 刚体定轴转动 |
|---|---|
| 位移 \(x\) | 角位移 \(\theta\) |
| 速度 \(v=\frac{dx}{dt}\) | 角速度 \(\omega=\frac{d\theta}{dt}\) |
| 加速度 \(a=\frac{dv}{dt}\) | 角加速度 \(\alpha=\frac{d\omega}{dt}\) |
| 质量 \(m\) | 转动惯量 \(J\) |
| 力 \(F=ma\) | 力矩 \(M=J\alpha\) |
| 动量 \(p=mv\) | 角动量 \(L=J\omega\) |
| 动能 \(E_k=\frac{1}{2}mv^2\) | 转动动能 \(E_k=\frac{1}{2}J\omega^2\) |
| 冲量 \(I=F\Delta t=\Delta p\) | 角冲量 \(I=M\Delta t=\Delta L\) |
| 功 \(W=F\cdot x\) | 功 \(W=M\cdot \theta\) |
| 功率 \(P=F\cdot v\) | 功率 \(P=M\cdot \omega\) |